
robotics
Unitree A2
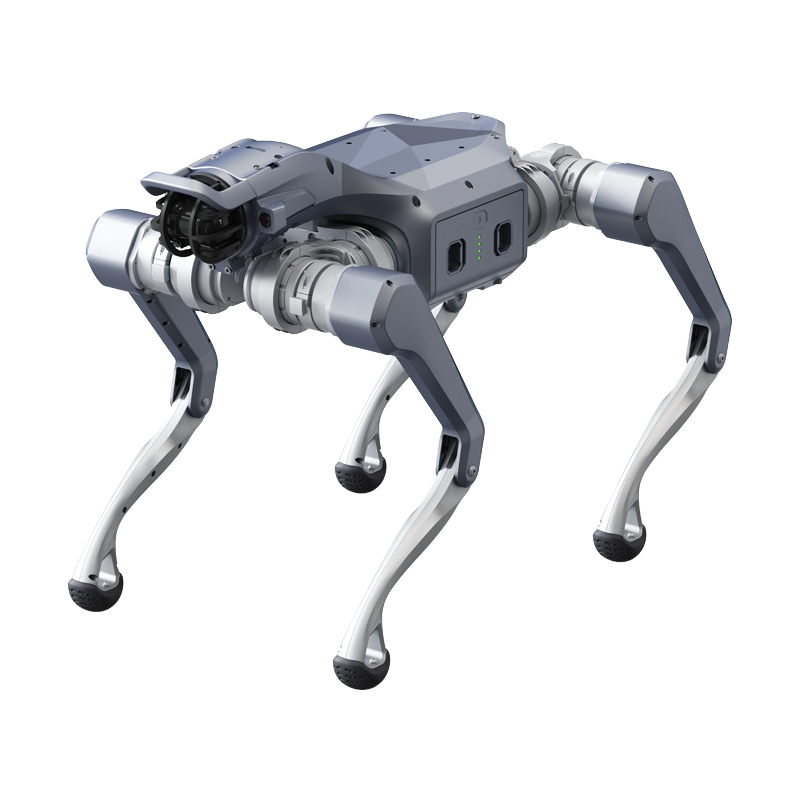
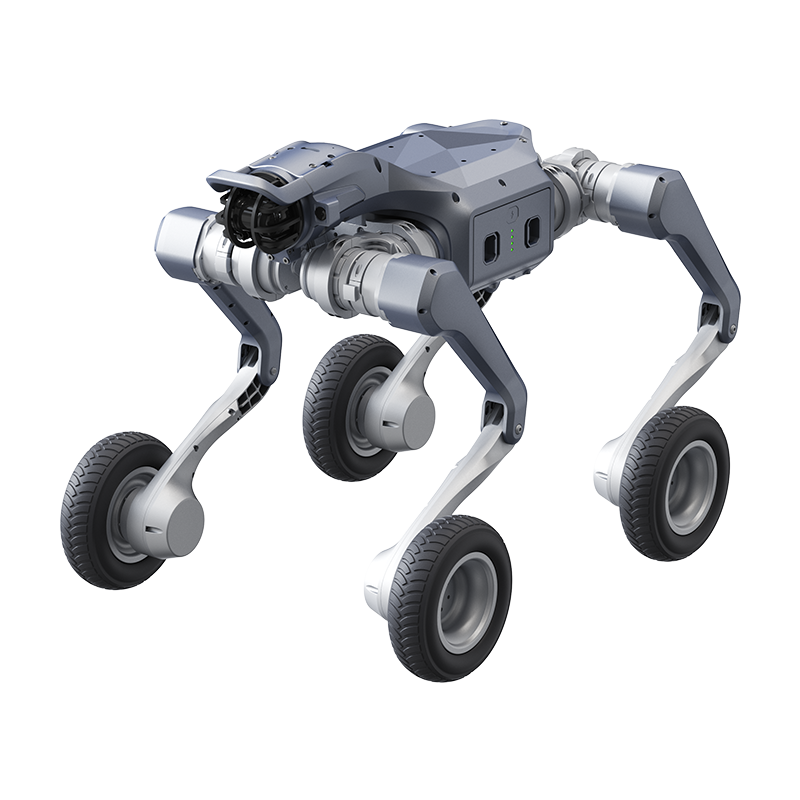
Unitree A2 是面向行业巡检、科研开发和户外移动任务的四足机器人,结合高负载机身、长距离移动能力、多传感器扩展和机器人开发接口,适合厂区、园区、实验室和复杂地形场景。
购买与可用性
了解和购买
上市状态:已上市价格:暂无公开信息地区:暂无公开信息订阅:暂无公开信息
不应误读为
市场定位
面向行业移动巡检、机器人科研、户外任务开发、载荷验证、复杂地形数据采集、园区设备检查和移动机器人算法测试的高负载四足机器人平台,适合需要在真实地面环境中验证感知、控制、通信和任务载荷的团队。
AI 能力
- A2 的智能能力集中在运动控制、姿态稳定、路径跟随、环境感知扩展、远程任务执行和机器人开发接口。搭配相机、激光雷达、边缘计算单元或行业载荷后,可承接巡检识别、地形通过、数据采集、移动监测和科研算法验证等任务。
硬件说明
- 核心硬件包括四足机器人本体、关节电机、机身电池、控制计算单元、传感器安装位、载荷接口和无线通信模块。不同版本会围绕续航、负载、环境防护、通信距离和二次开发接口形成配置差异。
规格资料
参数纠错
产品定位
- 产品类型
- quadruped-robot
AI 能力
- 能力概览
- A2 的智能能力集中在运动控制、姿态稳定、路径跟随、环境感知扩展、远程任务执行和机器人开发接口。搭配相机、激光雷达、边缘计算单元或行业载荷后,可承接巡检识别、地形通过、数据采集、移动监测和科研算法验证等任务。
资料来源
- 公开来源
- official
典型使用场景
- Unitree A2 是面向行业巡检、科研和户外移动任务的四足机器人,强调负载能力、长距离移动、复杂地形通过和多传感器扩展。
- A2 的智能能力集中在运动控制、姿态稳定、路径跟随、环境感知扩展、远程任务执行和机器人开发接口。搭配相机、激光雷达、边缘计算单元或行业载荷后,可承接巡检识别、地形通过、数据采集、移动监测和科研算法验证等任务。
隐私和风险说明
四足机器人在巡检和开发场景中可能采集视频、图像、位置、环境点云、任务日志和远程控制记录。企业部署时需要管理采集区域、人员可见范围、账号权限、无线网络、数据导出和第三方算法模块。
限制和注意事项
- 价格、地区供应、服务条款和软件功能可能随市场变化。
评测资料
NVIDIA Isaac GR00T 让人形机器人更接近共享开发工具链
相关文章 / 购买指南 / 市场观察
NVIDIA 持续推进 Isaac 和 GR00T 机器人平台,重点是把仿真、数据、模型、训练和部署工具连接起来,让人形机器人团队不用从零构建完整技术栈,也更容易比较任务表现。
NVIDIA GR00T N1.5 让人形机器人更接近可比较的开发平台
相关文章 / 购买指南 / 市场观察
GR00T N1.5 的重点不是单次演示,而是让人形机器人基础模型、仿真数据、参考工作流和不同硬件平台之间更容易被比较、复用、持续迭代和进入真实任务验证过程与复盘。
NVIDIA GR00T 参考人形机器人让行业进入可比较阶段
相关文章 / 购买指南 / 市场观察
NVIDIA 发布基于 Jetson Thor 与 Isaac GR00T 的参考人形机器人,把人形机器人竞争从演示视频推进到硬件、模型、仿真和开发平台能否复用的层面。
视频评测还未收录,欢迎补充官方演示、独立评测或上手视频。
延伸资料
类型来源域名操作
相关产品


讨论区
还没有已审核评论。欢迎提交一条线索进入审核。