
quadruped_robot
Unitree D1-T
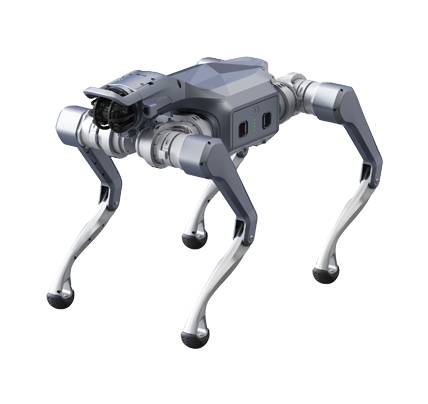
Unitree D1-T 是宇树面向遥操作和具身智能研究的四足机器人平台,官方强调远程操作能力、移动实验基础、复杂环境验证、机器人控制训练和真实空间数据采集流程。
购买与可用性
了解和购买
上市状态:已上市价格:暂无公开信息地区:暂无公开信息订阅:暂无公开信息
不应误读为
市场定位
适合具身智能研究、机器人遥操作实验、移动感知算法验证和复杂环境数据采集团队,用于连接真实机器人本体、视觉模型、控制算法和远程任务流程。
AI 能力
- D1-T 可作为具身智能和遥操作研究平台,用于机器人感知、动作控制、远程任务执行、数据采集、模仿学习和多模态交互实验。它的 AI 价值来自与上位机模型、视觉系统和控制算法结合后的完整机器人工作流。
硬件说明
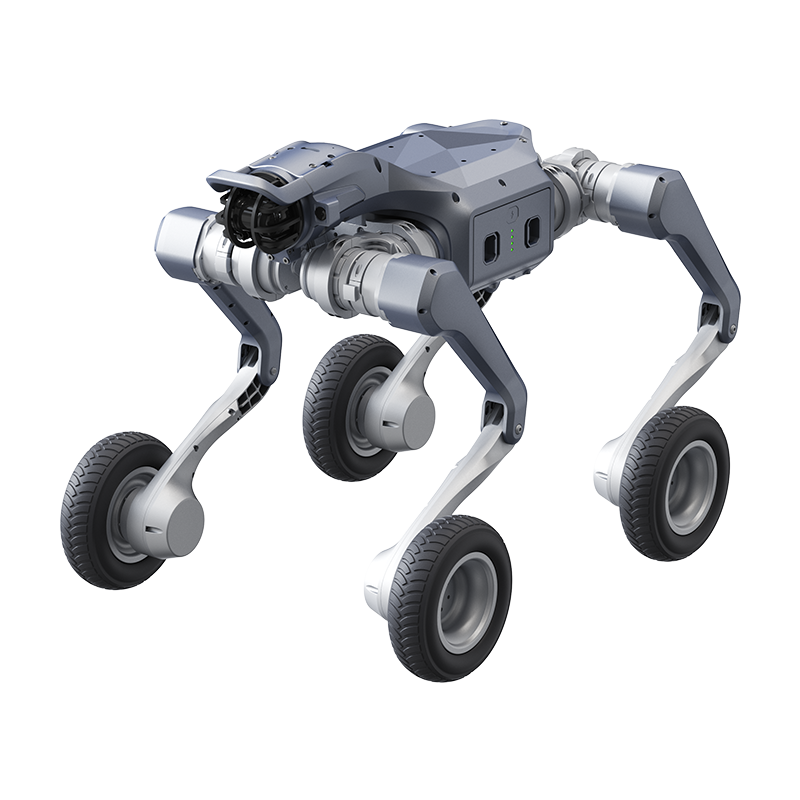
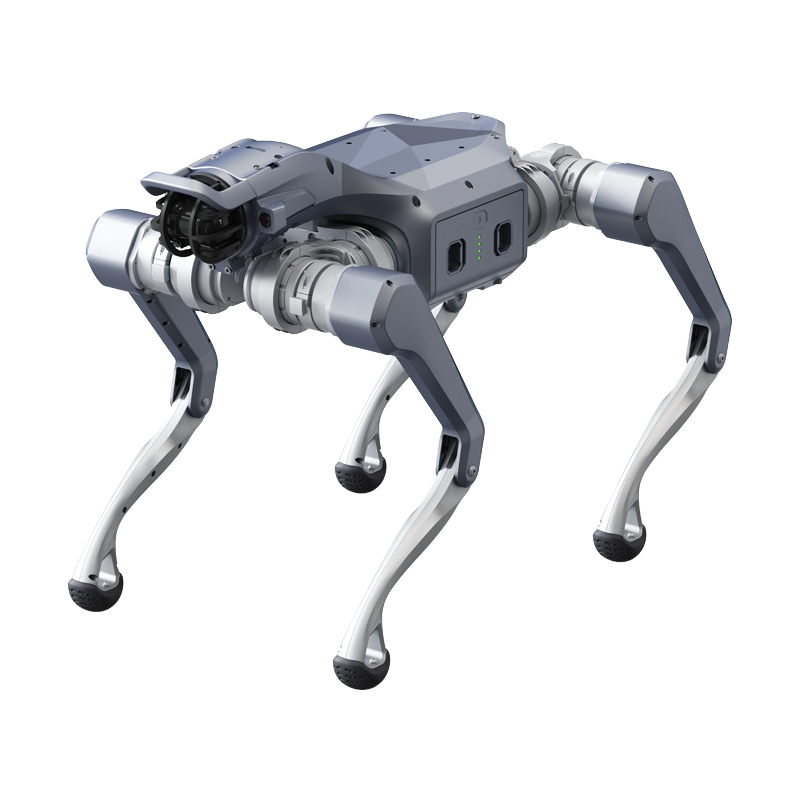
- D1-T 是四足移动机器人平台,官方页面展示了面向遥操作研究的机身形态。硬件重点包括四足运动结构、机身计算与接口、传感器安装空间、远程控制链路和适配具身智能研究的移动平台基础。
规格资料
参数纠错
产品定位
- 产品类型
- robotics
AI 能力
- 能力概览
- D1-T 可作为具身智能和遥操作研究平台,用于机器人感知、动作控制、远程任务执行、数据采集、模仿学习和多模态交互实验。它的 AI 价值来自与上位机模型、视觉系统和控制算法结合后的完整机器人工作流。
资料来源
- 公开来源
- 官方页面、地区供应、价格和服务条款共同决定实际可用性。
典型使用场景
- Unitree D1-T 是宇树面向遥操作和具身智能研究的四足机器人平台,官方强调远程操作能力和面向研究场景的移动操作基础。
- D1-T 可作为具身智能和遥操作研究平台,用于机器人感知、动作控制、远程任务执行、数据采集、模仿学习和多模态交互实验。它的 AI 价值来自与上位机模型、视觉系统和控制算法结合后的完整机器人工作流。
隐私和风险说明
用于遥操作和数据采集时,D1-T 可能记录室内外视频、操作轨迹、位置数据和实验环境信息。研究或部署团队应明确采集边界、远程接入权限、数据保存位置和人员可见区域,避免把敏感环境数据外传。
限制和注意事项
- 价格、地区供应、服务条款和软件功能可能随市场变化。
评测资料
搜索关键词: Unitree D1-T review YouTube 2026
还没有收录视频评测,欢迎补充上手、拆解、长期使用或购买建议视频。
延伸资料
相关产品

讨论区
还没有已审核评论。欢迎提交一条线索进入审核。